
Labor Ausstattung
Hier finden Sie eine Übersicht über die technische Ausstattung unseres Labors.
In unserem Labor werden Materialprüfmaschinen, Industrieroboter, optische Messsysteme und individuelle Aufbauten zur Beantwortung klinischer Fragestellungen der Traumatologie (Wirbelsäule, Becken, Schulter, Hand, Fuß und Knie) verwendet. In enger Zusammenarbeit mit den Chirurgen werden diese biomechanischen Daten genutzt, um zum Beispiel bessere Implantate und OP-Techniken zu entwickeln.
Bei weiterführenden Fragen zur Ausstattung oder technischen Detailfragen können Sie sich jederzeit an unsere Ingenieure wenden.
KUKA-Industrieroboter
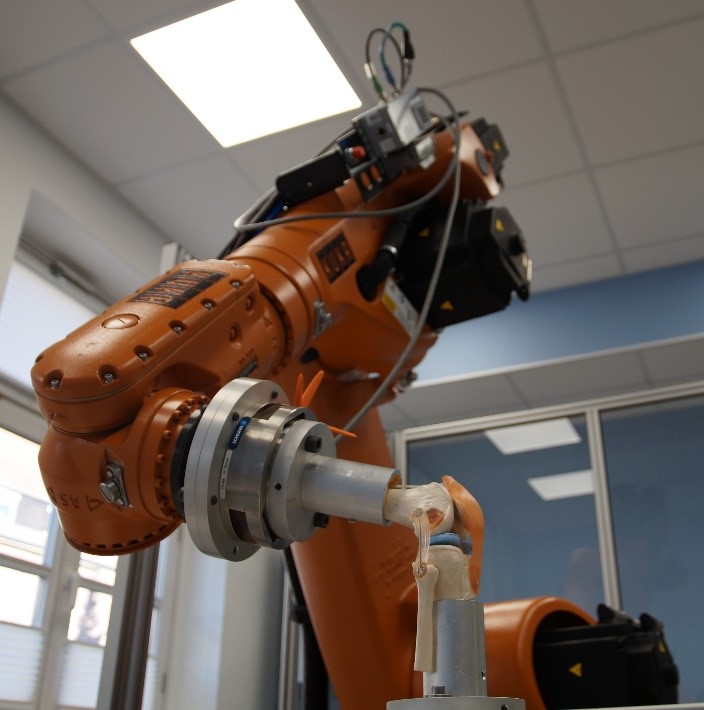
Unser KUKA – Industrieroboter verfügt über 6 Achsen und eine Nennlast von 125 kg. Der Roboter wird über die Software simVITRO gesteuert, mit der sich passive Bewegungsabläufe an verschiedenen humanen Gelenken (Knie, Schulter, Fuß und Wirbelsäule) durchführen lassen. Die dabei auftretenden Kräfte und Verschiebungen können so exakt gemessen werden.
Mehr über unsere Roboter und das Kunstwerk vor dem Eingang der chirurgischen Klinik können Sie hier erfahren.
Instron 8874
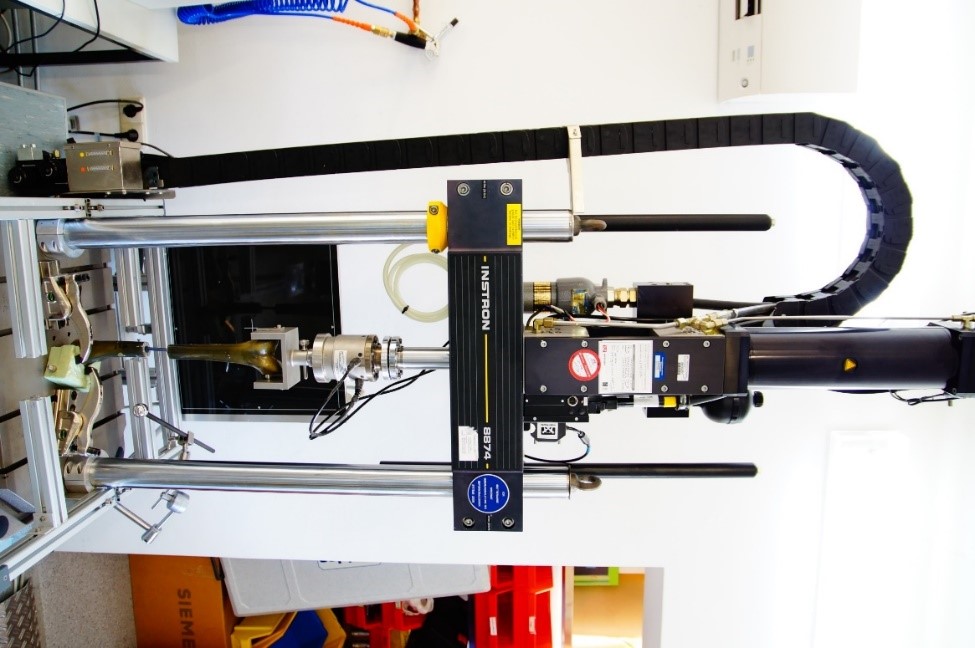
Bei der Instron 8874 handelt es sich um ein biaxiales, servohydraulisches Tischprüfsystem. In der Traverse befindet sich ein dynamischer Zylinder für Axial- und Torsionsbelastungen. Die Steuerung erfolgt über die Console Software, die die Einstellung umfassender Parameter zulässt.Die zusätzliche WaveMatrix™ -Software kann in unserem Labor optimal für Blockversuche eingesetzt werden.
Zwick/ Roell Z005

Bei der Zwick/Roell Z005 handelt es sich um eine spindelgetriebene Tischprüfmaschine zur Beurteilung von verschiedenen Materialien. Die Maschine ist für zahlreiche quasi-statische Prüfungen in Zug- und Druckrichtung ausgelegt.
Hexagon Absolute Arm 8320-7

Der Absolute Arm von Hexagon verfügt über sieben Achsen mit zwei Metern Reichweite und ist spezialisiert auf hochgenaues Antasten von Objekten. In unserem Labor nutzen wir den Absolute Arm für vielfältige Fragestellungen, bei denen wir eine äußerst präzise Erfassung der einzelnen Lagepunkte im Raum benötigen. Zusätzlich zeichnet sich der Absolute Arm durch seine Kompatibilität mit dem simVitro Systems unseres Kuka-Roboters aus.
Aramis 12M (GOM GmbH)
Bei unserem ARAMIS Kamerasystem handelt es sich um ein hochauflösendes Kamerasystem zur Erfassung von passiven Punktmarkern und/oder flächigen Dehnungsmustern in 3D. Durch das Einsetzen neuester Kameratechnologie mit 12-Megapixel wird eine besonders hohe Ortsauflösung erreicht, die wichtig ist, um auch lokale Dehnungseffekte in großen Messvolumen erfassen zu können
NDI OptoTrak Certus

Der OptoTrak Certus verfolgt kinetische und kinematische Bewegungen in Echtzeit. Eine aktive 3D-optische Technologie wird genutzt, um die Position und Ausrichtung von Aktivmarkern zu erfassen.
Examion X-DR
Der Examion Detektor ist ein portabler, digitaler und selbstkalibrierender Röntgendetektor, den wir zusammen mit unserer ebenfalls portablen Röntgenquelle betreiben. Röntgenaufnahmen finden im klinischen Alltag im Zusammenhang mit verschiedenartigen Fragestellungen Verwendung und spielen auch in unserem Labor eine wichtige Rolle.
Bambu Lab X1 Carbon
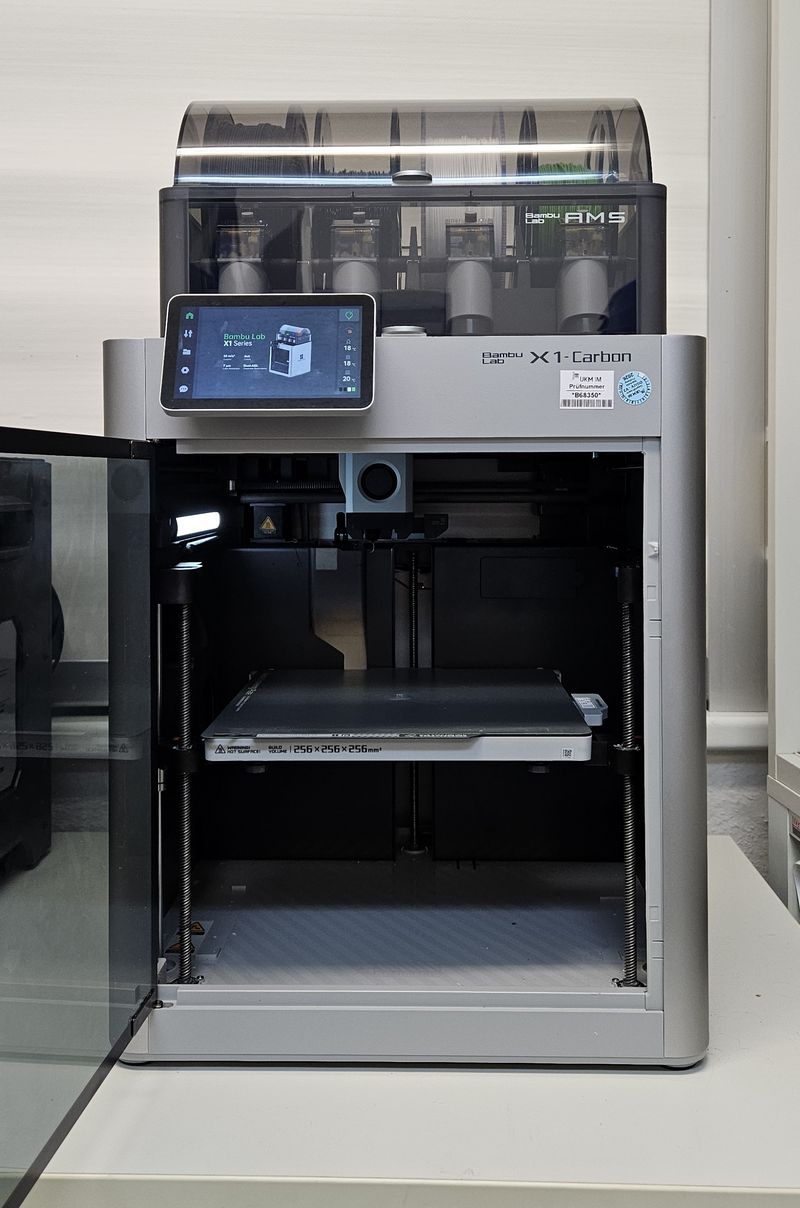
Der Bambu Lab X1 Carbon ist ein 3D-Drucker der sich durch hohe Präzision sowie Geschwindigkeit auszeichnet. In Kombination mit dem Automatic Material System (AMS) bietet er die Möglichkeit verschiedene Materialien in einem einzigen Druck zu kombinieren. Durch eine bis auf 300°C aufheizbare Düse, ein auf 120° aufheizbares Heizbett und einen geschlossenen Bauraum können auch mechanisch hochbelastbare Materialien verwendet werden.